Exercices corrigés : Asservissement d’un moteur à CC par PID et placement de Pôles
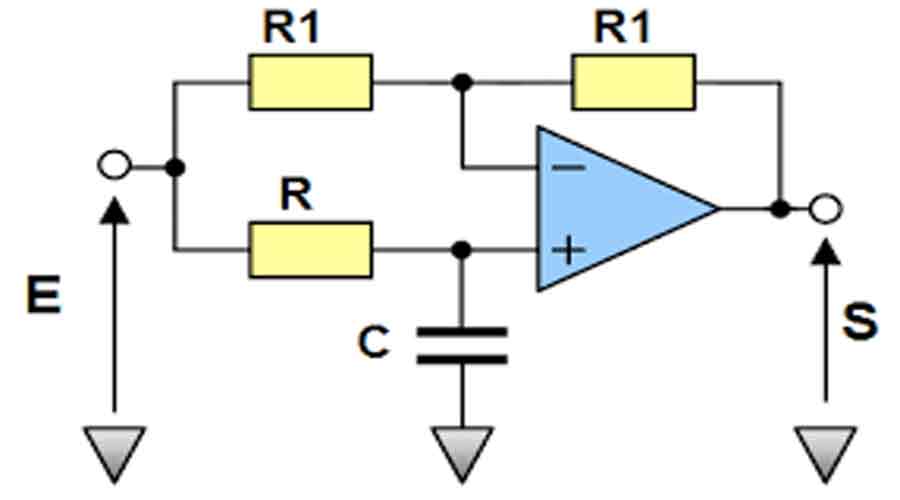
Pour pouvoir régler convenablement le régulateur PID, il faut tout d’abord calculer la fonc-tion de transfert en boucle fermée de la boucle d’asservissement. Classiquement, la fonction de tranfert d’un moteur à courant continu (MCC) peut êtreassimilée à un système du premier ordre (la constante de temps électrique étant beaucoupplus rapide que la constante de temps mécanique).
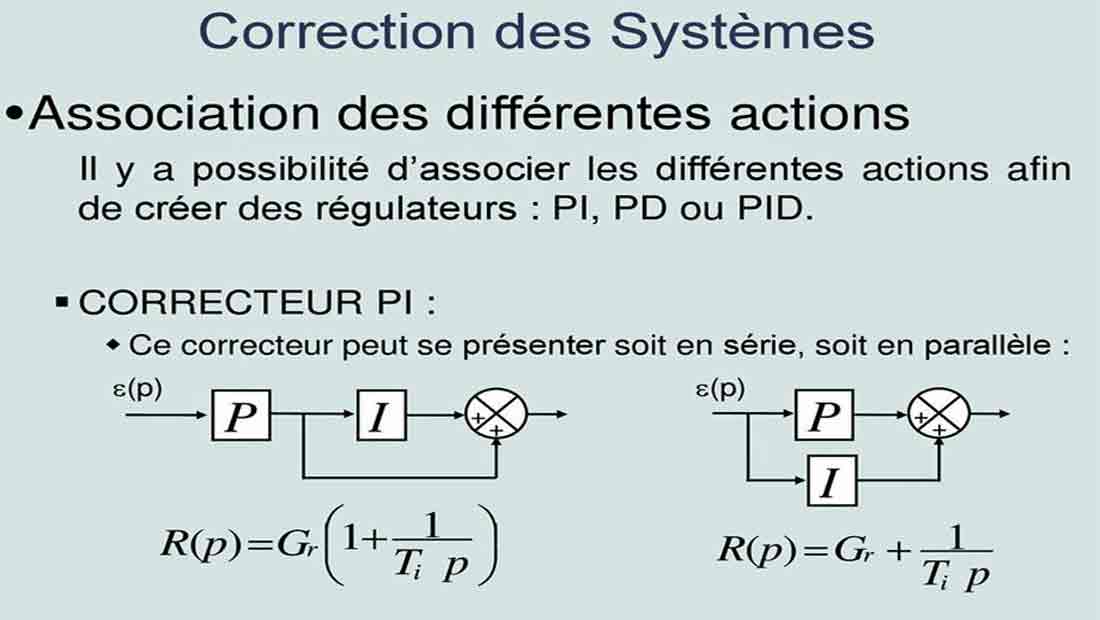
Régler un régulateur PID (Proportionnel-Intégral-Dérivé) peut sembler complexe, mais en suivant une méthodologie structurée, cela devient plus gérable. Voici les étapes de base pour régler un PID :
1. Méthode de Ziegler-Nichols
C’est l’une des méthodes les plus populaires pour régler un PID.
Étape 1 : Réglage proportionnel uniquement
Réglez les paramètres de contrôle intégral (I) et dérivé (D) à zéro.
Augmentez le gain proportionnel (Kp) jusqu’à ce que le système oscille à une amplitude constante (limite de stabilité). Notez ce gain, appelé Kc, et la période des oscillations, appelée P.
Étape 2 : Appliquer les formules de Ziegler-Nichols
PID standard :
𝐾𝑝=0.6×𝐾𝑐
Ti=P/2
Td=P/8
2. Méthode empirique
Si la méthode de Ziegler-Nichols ne fonctionne pas bien pour votre système, vous pouvez essayer une méthode plus empirique.
Étape 1 : Réglage proportionnel
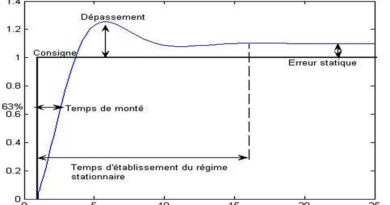
Commencez avec des valeurs faibles pour Kp et augmentez progressivement jusqu’à obtenir une réponse stable avec un minimum de dépassement.
Étape 2 : Réglage intégral
Introduisez un faible terme intégral (Ki) pour éliminer l’erreur de régime permanent. Augmentez lentement Ki jusqu’à ce que l’erreur de régime permanent soit corrigée sans provoquer de grandes oscillations.
Étape 3 : Réglage dérivé
Ajoutez un terme dérivé (Kd) pour améliorer la stabilité et réduire les oscillations. Augmentez Kd jusqu’à obtenir une réponse douce sans fluctuations rapides.
Exercices corrigés : Asservissement d’un moteur à CC par PID et placement de Pôles
Sujets similaires:
 Exercices : Représentation d’état et placement de pôles
Exercices : Représentation d’état et placement de pôles
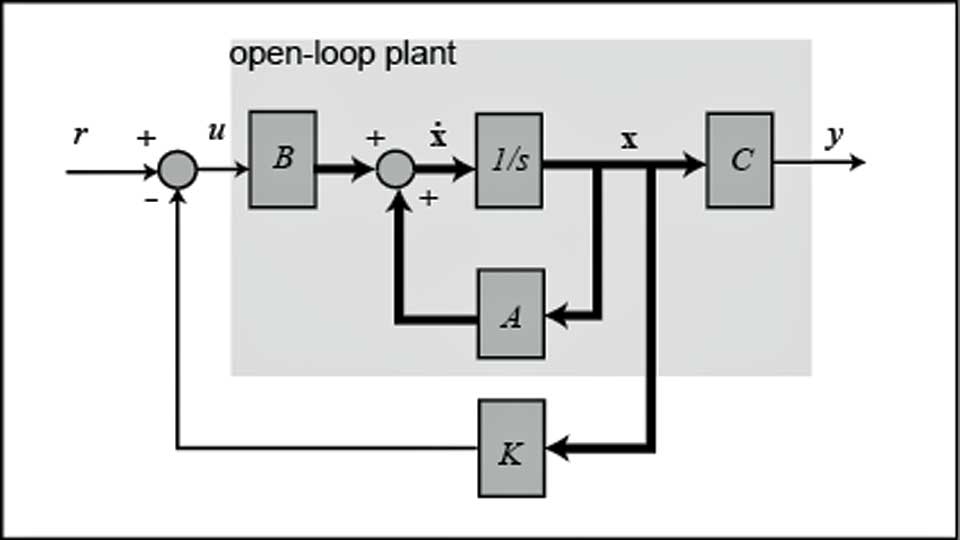
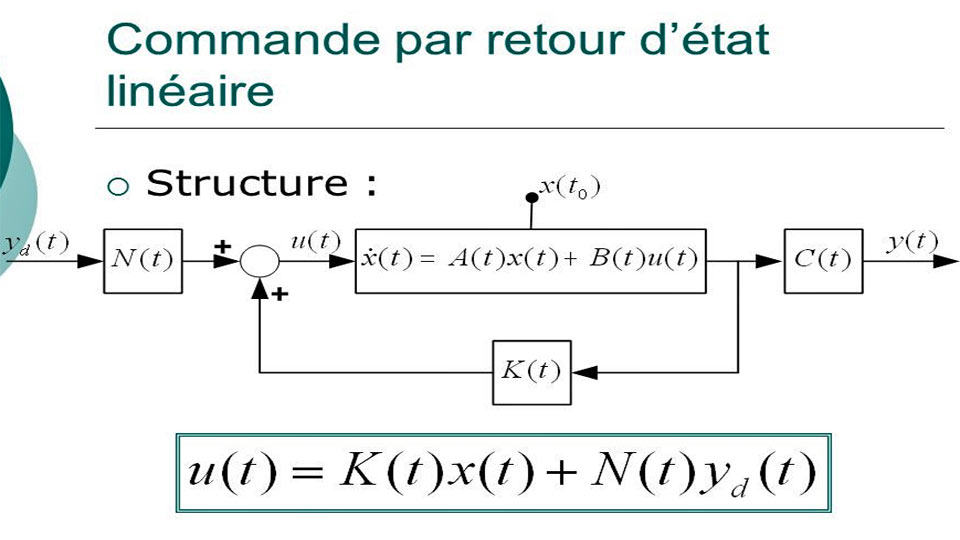 Exercices : Commande par placement de pôles ( Retour d’état)
Exercices : Commande par placement de pôles ( Retour d’état)
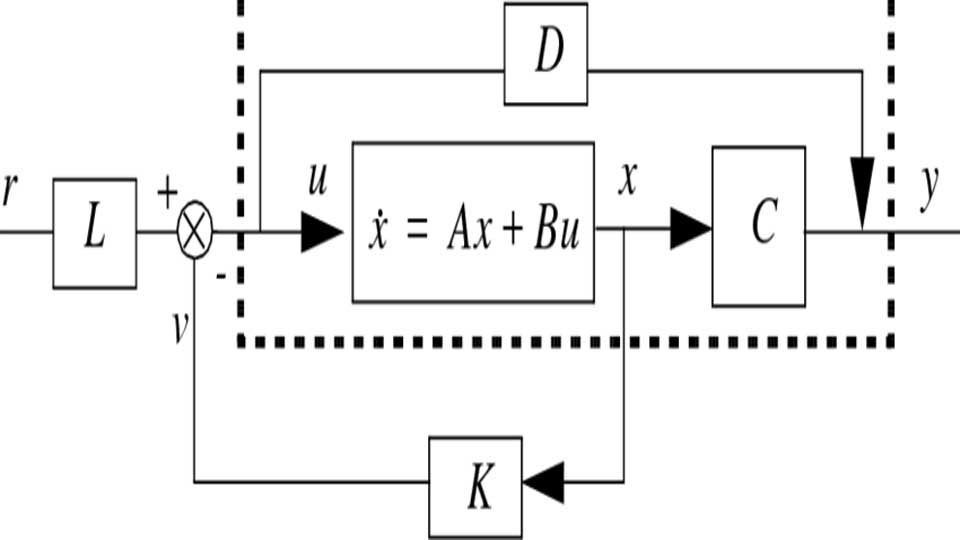 Exercices corrigés sur la commande par retour d’état
Exercices corrigés sur la commande par retour d’état
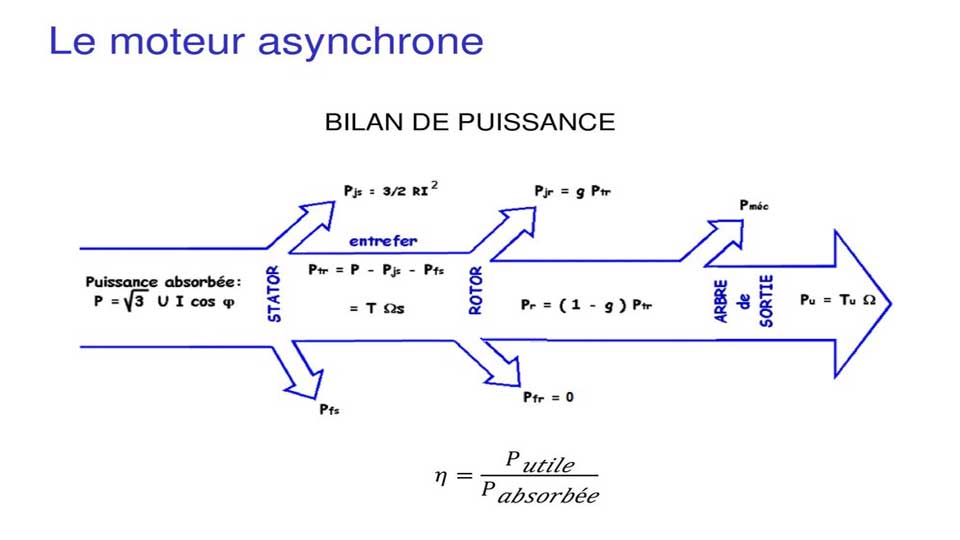 Exercices corrigés sur le moteur asynchrone triphasé
Exercices corrigés sur le moteur asynchrone triphasé
 EXERCICES CORRIGES : Bilan des puissances et compensation du facteur de puissance
EXERCICES CORRIGES : Bilan des puissances et compensation du facteur de puissance