Skip to content
Nombre de vues : 4 628
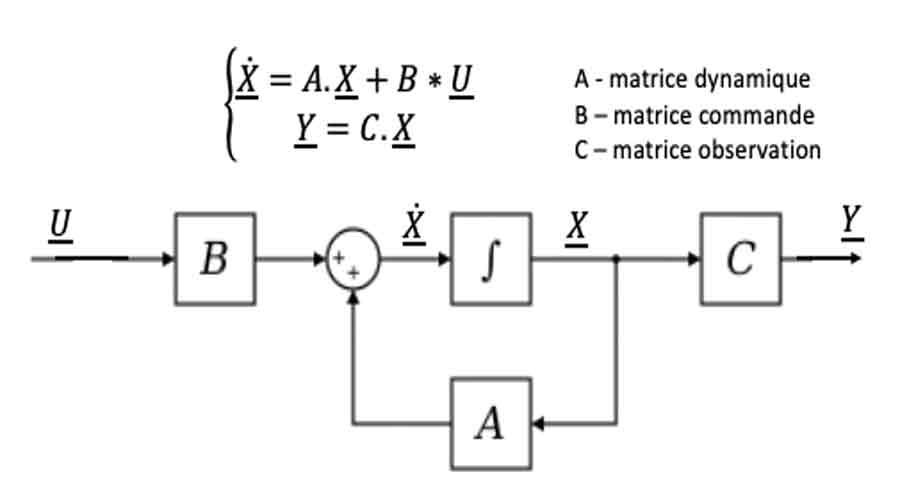
Rappels : Un système linéaire invariant est asymptotiquement stable si toutes les valeurs propres de la matrice d’état A sont à partie réelle strictement négative.
Approche pratique de vérification de la commandabilité :
-
Former la matrice de commandabilité Q (A, B)
-
Calculer le rang de Q (A, B)
-
En déduire que le système est commandable que si rang(Q (A, B) )=n
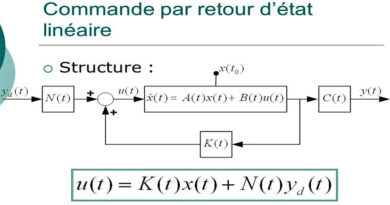
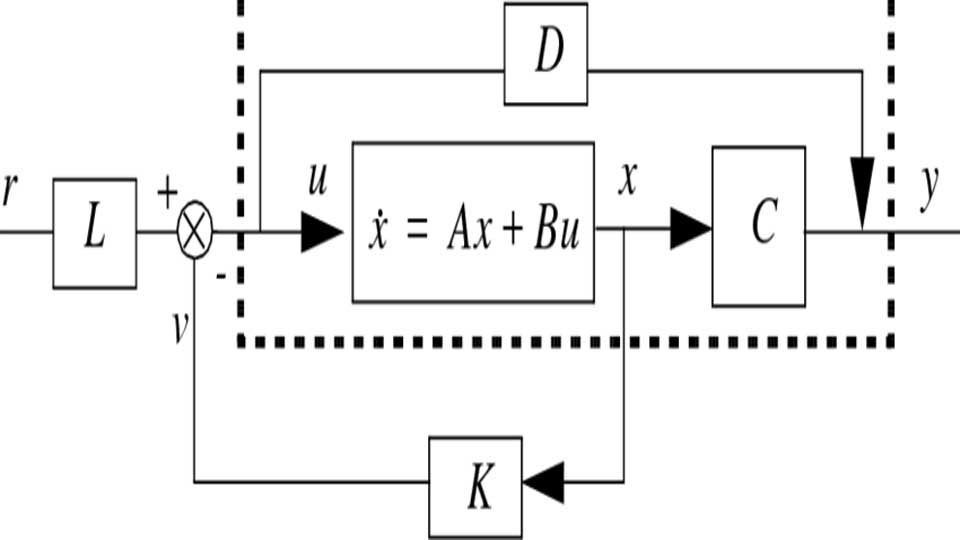
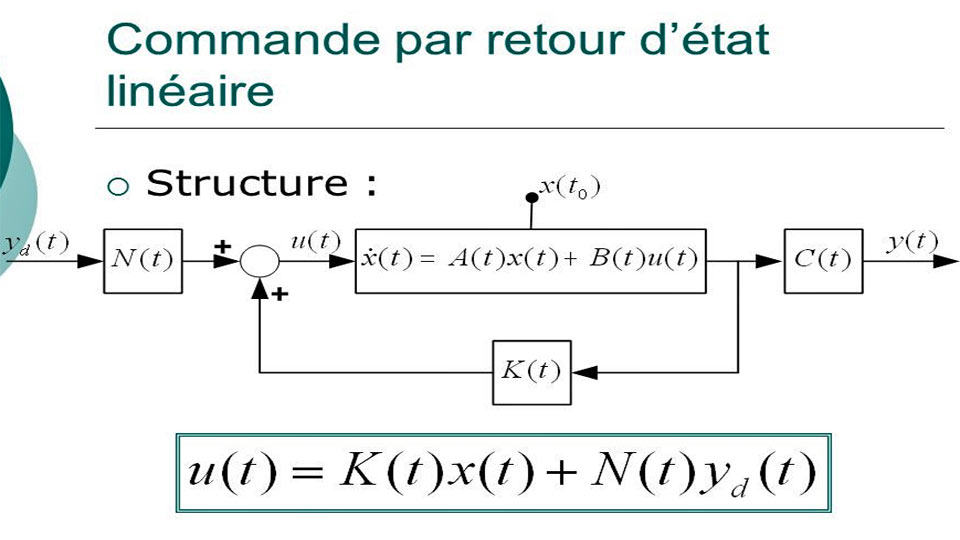
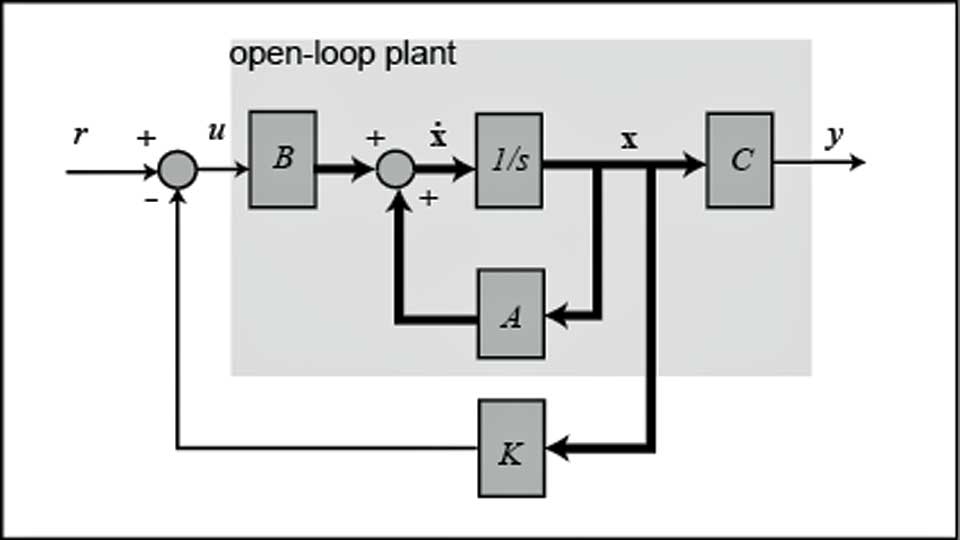
La commande par retour d’état modifie la dynamique propre ( les pôles) du système en vue d’augmenter la stabilité, la précision et la rapidité.
Cette technique peut être étendue au cas des processus décrits par une représentation d’état. La méthode consiste à élaborer un signal de commande u à partir des états x1, x2…xn.
Exercices Placement de pôles ( commande par retour d’état)

 Exercices : Commande par placement de pôles ( Retour d’état)
Exercices : Commande par placement de pôles ( Retour d’état)
 Exercices : Représentation d’état et placement de pôles
Exercices : Représentation d’état et placement de pôles
 Exercices : Système de second ordre – Correcteur PID et PD
Exercices : Système de second ordre – Correcteur PID et PD
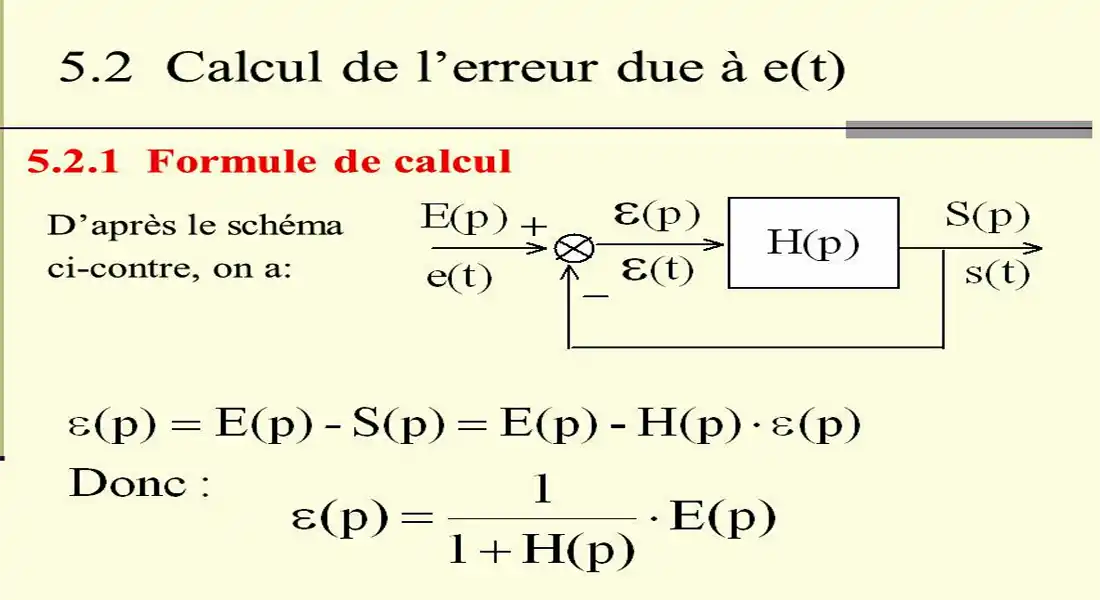
 Exercices : Calcul des erreurs de position et de vitesse d’un système asservi
Exercices : Calcul des erreurs de position et de vitesse d’un système asservi
 Exercice corrigé: Redressement commandé ( pont mixte)
Exercice corrigé: Redressement commandé ( pont mixte)