Skip to content
Nombre de vues : 7 618
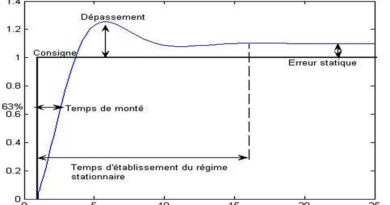
Correcteur P : Une augmentation du gain entraîne un diminution de l’erreur statique. Ce qui rend le système plus rapide mais augmente l’instabilité du système.
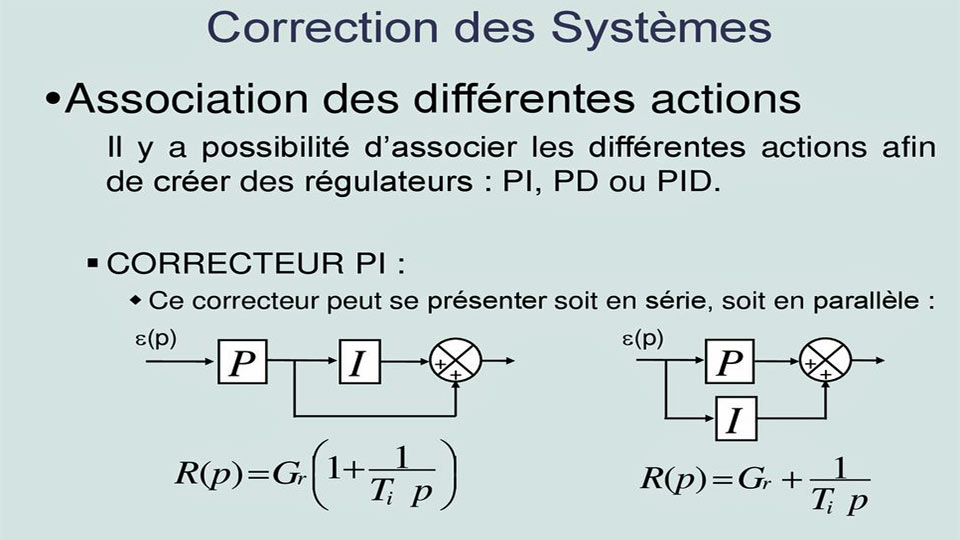
Correcteur PI : L’intérêt principal de ce correcteur est d’ajouter dans la chaîne de commande une intégration. La présence d’une intégration dans la FTBO, annuler l’erreur statique pour une entrée en échelon. L’intérêt principal de ce type de correcteur est donc d’améliorer la précision. Mais il introduit malheureusement un déphasage de -90° et risque de rendre le système instable(diminution de la marge de phase).
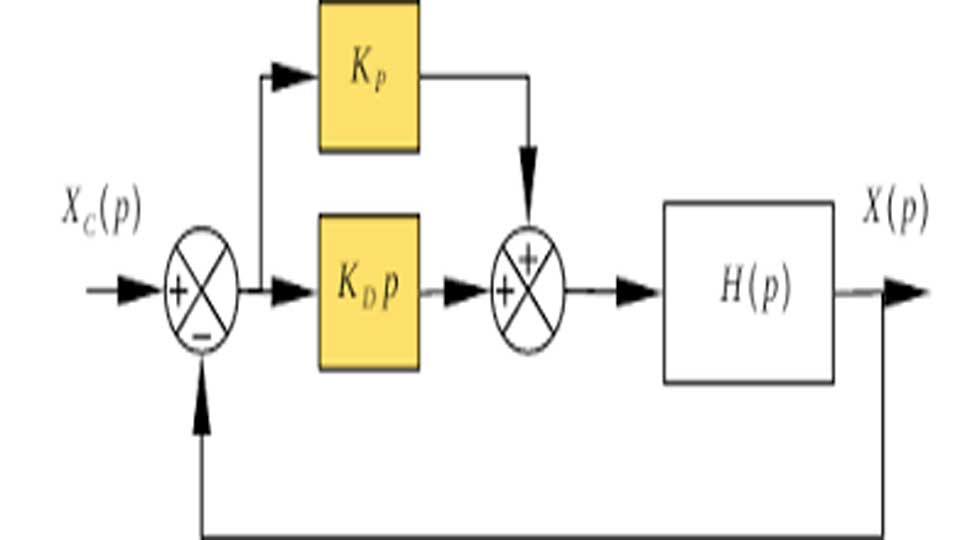
Correcteur PD : Effet statique :(entrée en échelon ou évolution constante) le système n’intervenant que sur la dérivée de l’erreur, en régime permanent si l’erreur est constante, le dérivateur n’a aucun effet.
Effet dynamique: l’intérêt principal de la correction dérivée est sont effet stabilisant, elle s’oppose aux grandes variations de l’erreur (donc aux oscillations), elle permet donc de stabiliser le système et d’améliorer le temps de réponse.
Correcteur PID : Le correcteur P.I.D se comporte pour le basses fréquences comme un intégrateur. Le système sera précis d’un point de vue statique, aux hautes fréquences l’avance de phase est de +90° donc une amélioration de la stabilité.

 Exercices : Calcul des erreurs de position et de vitesse d’un système asservi
Exercices : Calcul des erreurs de position et de vitesse d’un système asservi
 Exercice : Systèmes asservis – Correcteur Proportionnel Dérivateur
Exercice : Systèmes asservis – Correcteur Proportionnel Dérivateur
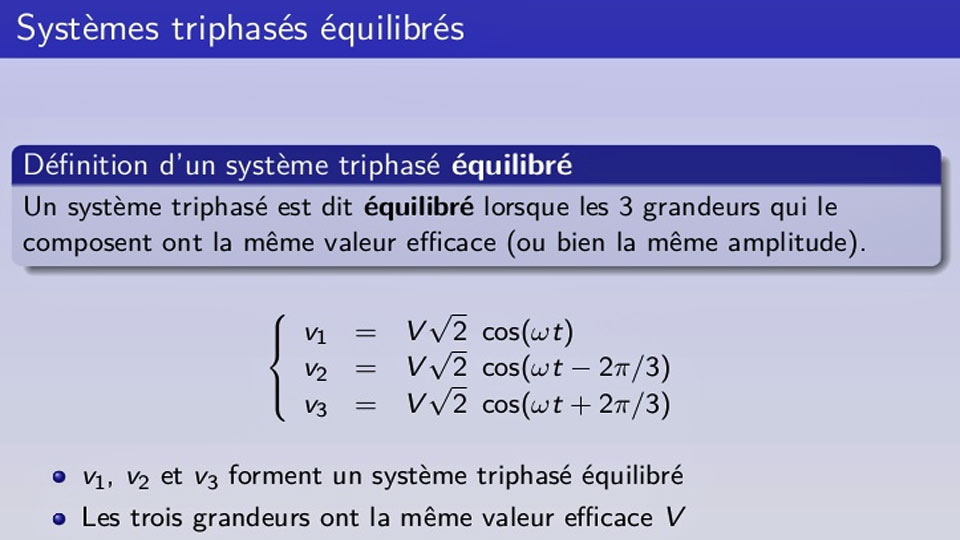 Exercices corrigés sur les puissances actives et réactives en système triphasé
Exercices corrigés sur les puissances actives et réactives en système triphasé
 Exercices : Série 1 – Transformateur monophasé avec correction
Exercices : Série 1 – Transformateur monophasé avec correction
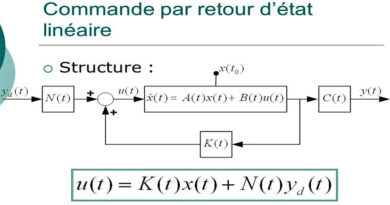
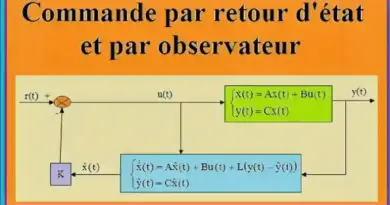
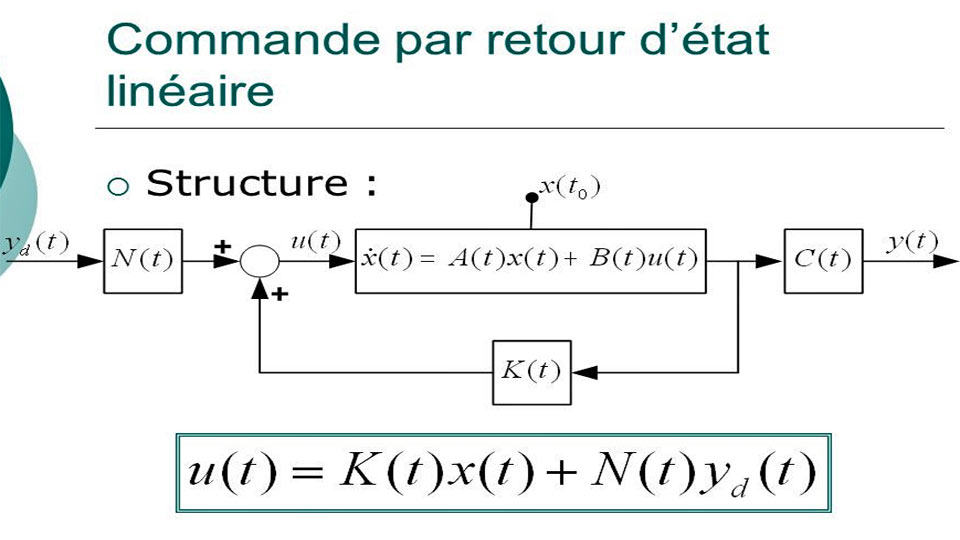 Exercices : Commande par placement de pôles ( Retour d’état)
Exercices : Commande par placement de pôles ( Retour d’état)