Skip to content
Nombre de vues : 6 320
Comment calculer l’erreur statique : Le calcul de l’erreur statique n’est valide que si le système est stable. Il faut donc s’assurer de stabiliser le système étudié avant toute considération de l’erreur statique.
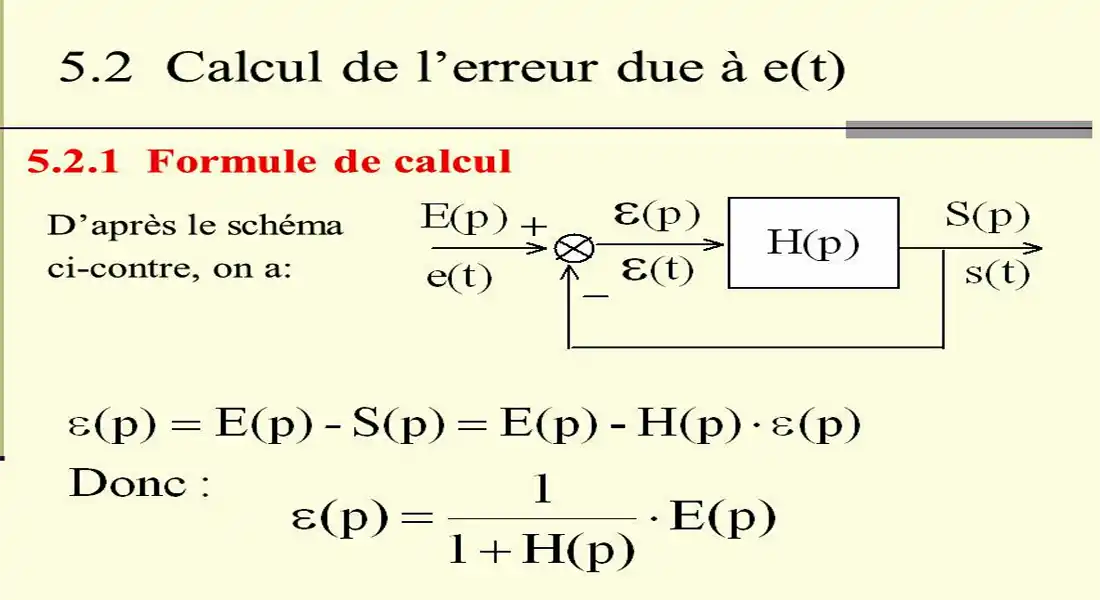
L’écart en régime permanent est la limite quand t tend vers l’infini de ε(t) = c(t) – s(t). Un système sera précis si cet écart tend vers 0, c’est à dire que la sortie tend vers la consigne spécifiée à l’entrée. Dans le cas d’une entrée constante, l’écart en régime permanent est appelé écart statique ou erreur statique.
Erreur statique : L’erreur indicielle est l’erreur entre une entrée en échelon constant et la sortie du système. L’entrée est donc de la forme : c(t) = a u(t); soit dans le domaine symbolique: c(p) = a/p.
Erreur de traînage : Appelée aussi l’erreur de poursuite ou de vitesse. C’est l’erreur entre la sortie et une entrée de type rampe c(t) = a t u(t). Ce signal test permet de voir l’aptitude d’un système asservi de pouvoir suivre une consigne variable dans le temps.