Skip to content
Nombre de vues : 6 241
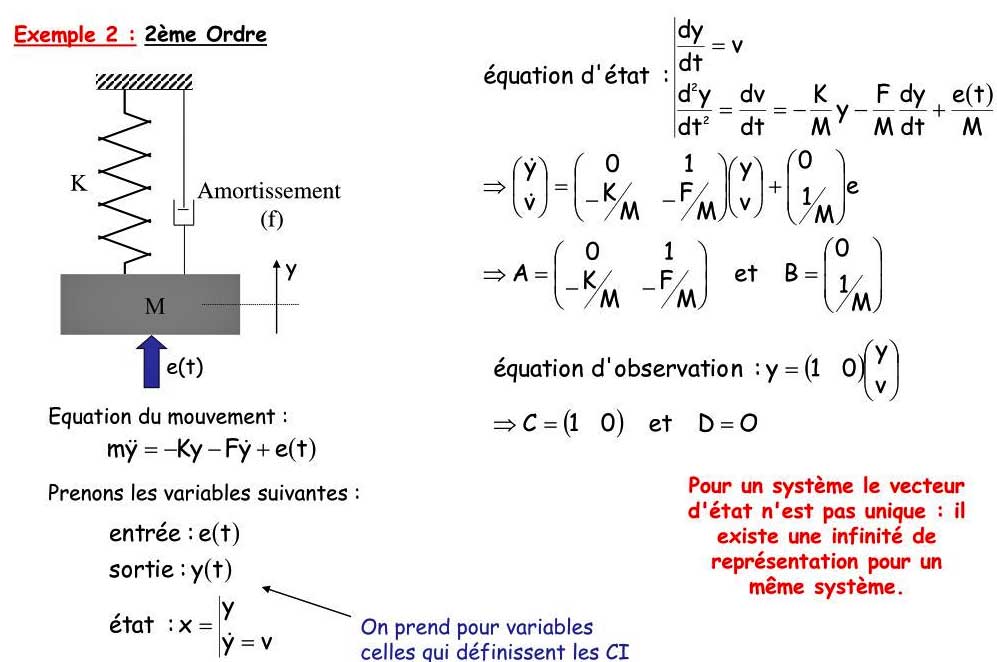
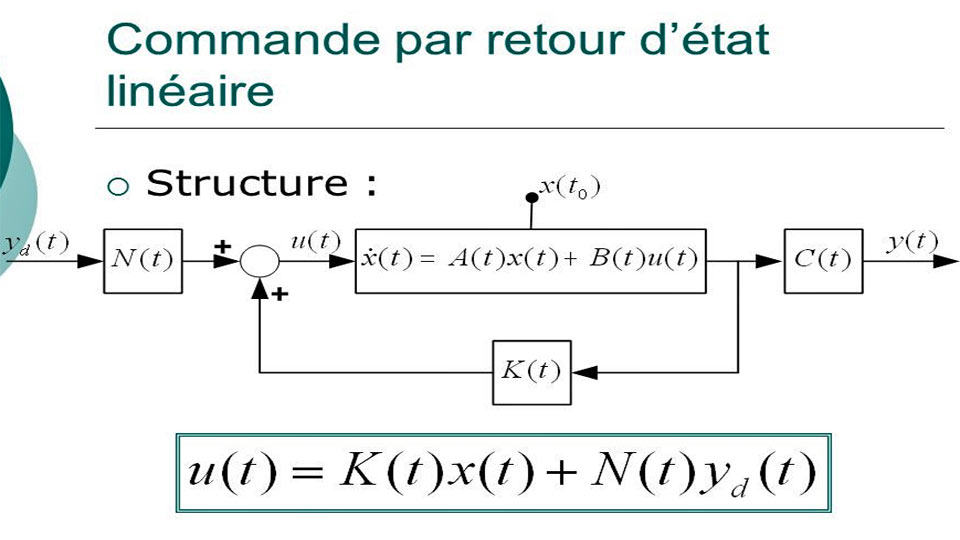
Les variables d’état x1, . . . , xn représentent un ensemble de variables réelles nécessaires pour décrire le système telles que, leur connaissance à l’instant t0 ainsi que celle du signal d’entrée permettent de calculer le signal de sortie pour tout t ≥ t0. L’ensemble des variables d’état forme le vecteur d’état.
La représentation d’un système dynamique à temps continu peut être obtenue soit à partir de sa représentation par équations différentielles soit à partir de sa représentation par fonction de transfert.