Skip to content
Nombre de vues : 110 109
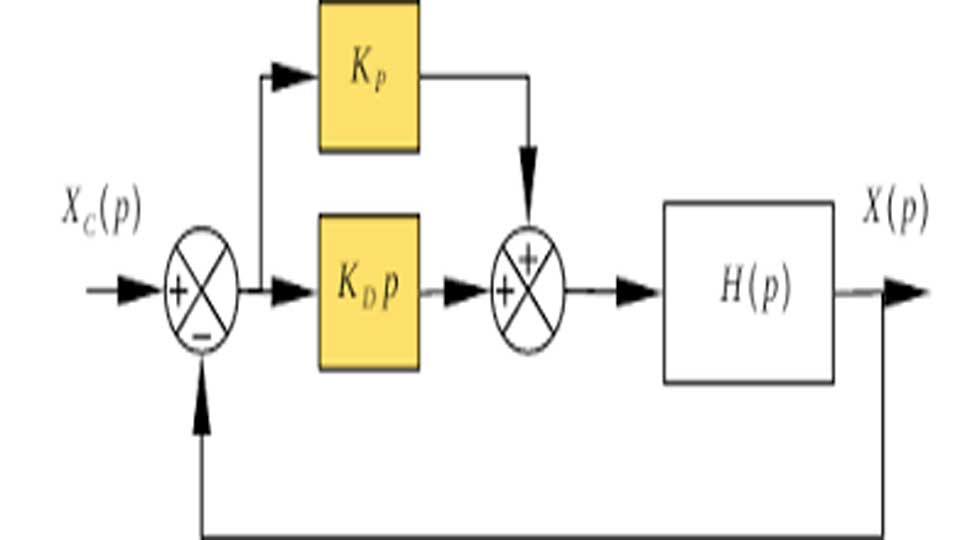
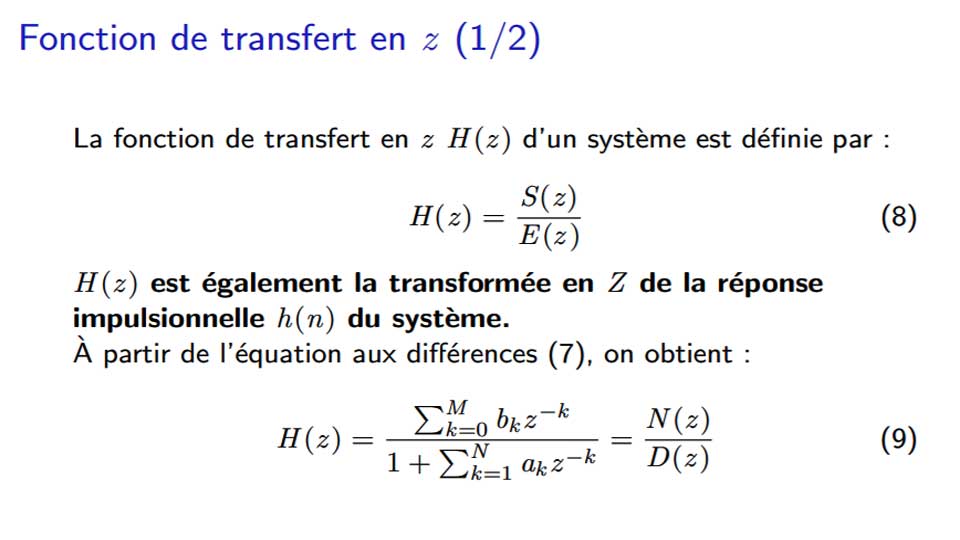
La fonction de transfert d’un correcteur proportionnel dérivé est  , que l’on peut mettre sous la forme :
, que l’on peut mettre sous la forme : 
On obtient la correction suivante :
-
augmentation de la phase de +90° pour 
-
amplifie les hautes fréquences (augmente aussi les bruits de mesure, de parasites… ce qui pose probème).
Amélioration de la précision et de la vélocité (correcteur PD)
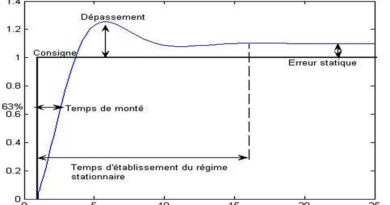
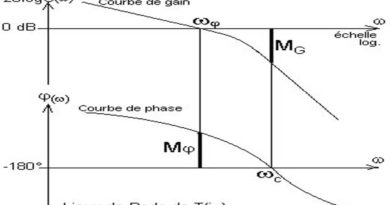
Ce correcteur ne change pas la classe de l’asservissement mais permet de remonter la courbe de gain en boucle ouverte dans le domaine des basses pulsations, ce qui diminue soit l’erreur de position en classe 0 soit l’erreur de traînage en classe 1. Mais surtout ce correcteur décale la courbe d
Exercice :
Correction :