Exercices Corrigés : Passage d’une fonction de transfert à la représentation d’état
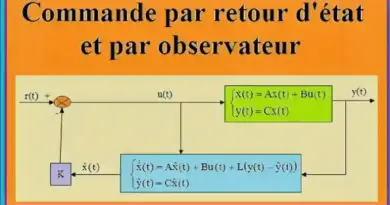
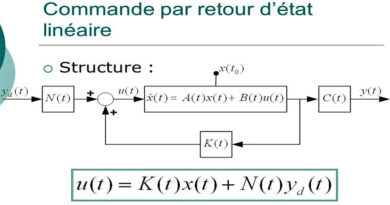
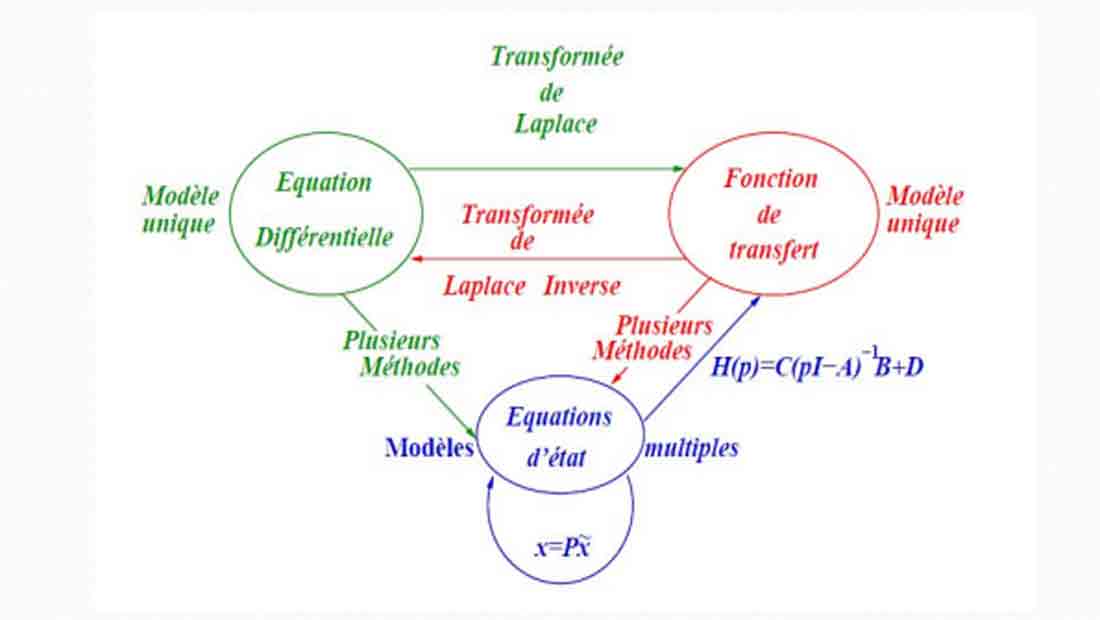
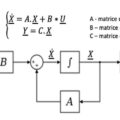
En automatique, une représentation d’état permet de modéliser un système dynamique en utilisant des variables d’état. Cette représentation, qui peut être linéaire ou non, continue ou discrète, permet de déterminer l’état du système à n’importe quel instant futur si l’on connaît l’état à l’instant initial et le comportement des variables exogènes qui influent sur le système.
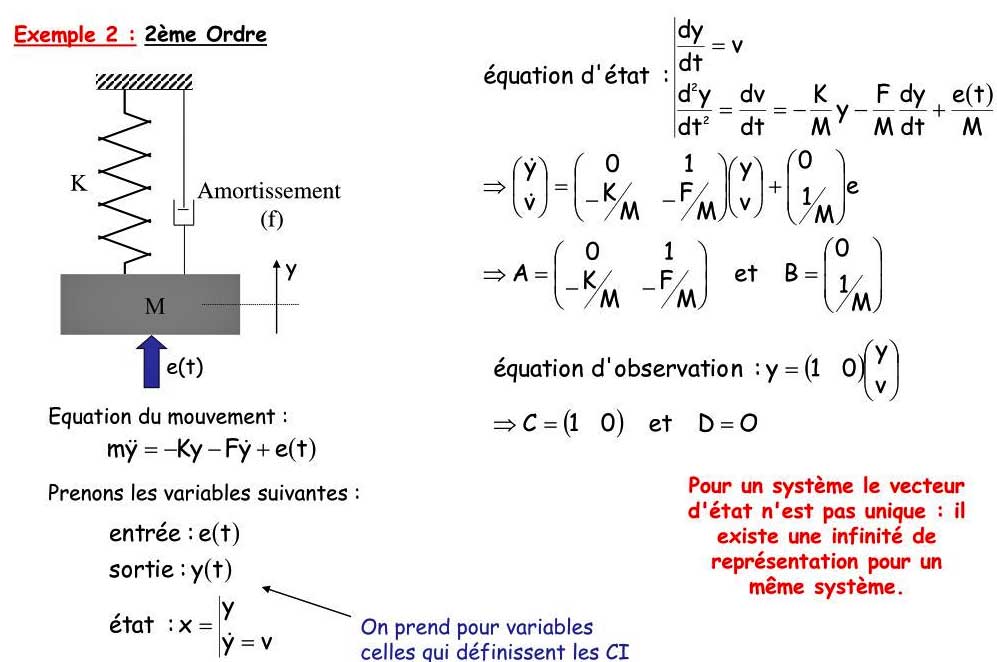
Il est important de noter que, contrairement à la représentation par équation différentielle, la représentation d’état d’un système n’est pas unique et dépend du choix des variables d’état que nous opérons.
On peut passer d’une représentation d’état à une autre équivalente par une transformation linéaire.
Il est rare que la sortie du système soit directement reliée à son entrée. On a donc très souvent D = 0.
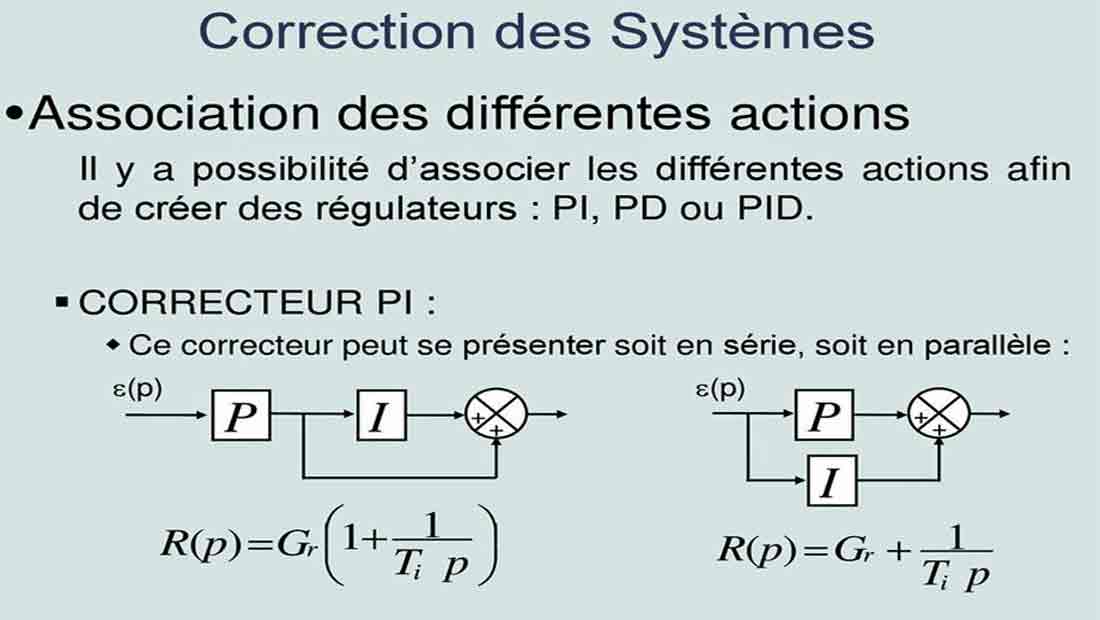
différentes formes pour le modèle d’état sont considérées :
La forme canonique commandable, et a la forme canonique observable,
Puis forme canonique modale (diagonale)
Sans oublier la forme canonique de Jordan.
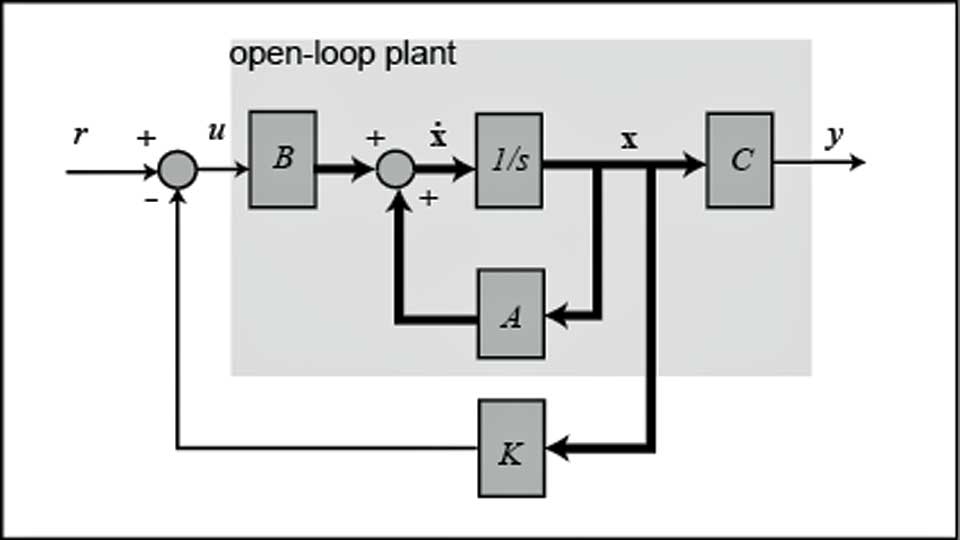
Dans la théorie des systèmes linéaires, les représentations d’état sont une méthode puissante pour analyser et concevoir des systèmes de commande. Deux formes spéciales de représentation d’état sont souvent utilisées. la forme canonique commandable (ou contrôlable) et la forme canonique observable. Ces formes facilitent l’analyse de la commandabilité et de l’observabilité du système.
Exercices Corrigés : Passage d’une fonction de transfert à la représentation d’état
Sujets similaires:
 Exercice corrigé : Détermination de la fonction de transfert à partir de la représentation d’état
Exercice corrigé : Détermination de la fonction de transfert à partir de la représentation d’état
 Exercices avec correction sur la représentation d’état d’un système asservi
Exercices avec correction sur la représentation d’état d’un système asservi
 Exercices : La représentation d’état des systèmes asservis
Exercices : La représentation d’état des systèmes asservis
 TD : Représentation d’état d’un système asservi avec Correction
TD : Représentation d’état d’un système asservi avec Correction
 Exercices : Représentation d’état et placement de pôles
Exercices : Représentation d’état et placement de pôles