Exercice Corrigé sur le placement de Pôles et l’Observateur d’etat d’un système asservi
Le placement de pôles permet de modifier la dynamique d’un système linéaire. La méthode d’Ackermann calcule le gain de retour d’état à partir des pôles désirés. Elle est utilisable si le système est entièrement commandable.
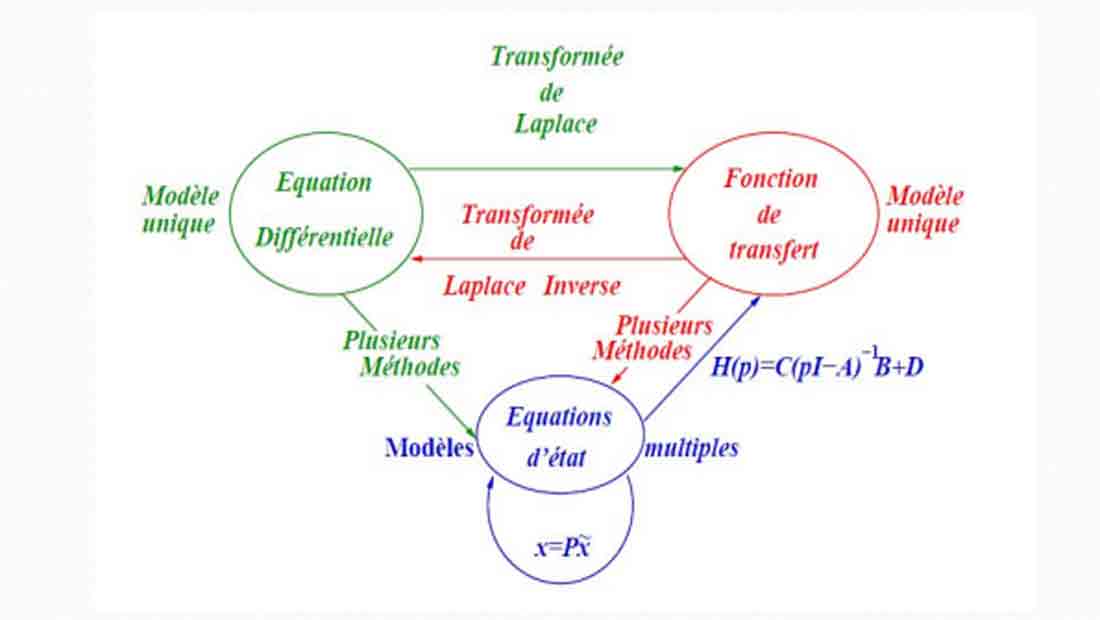
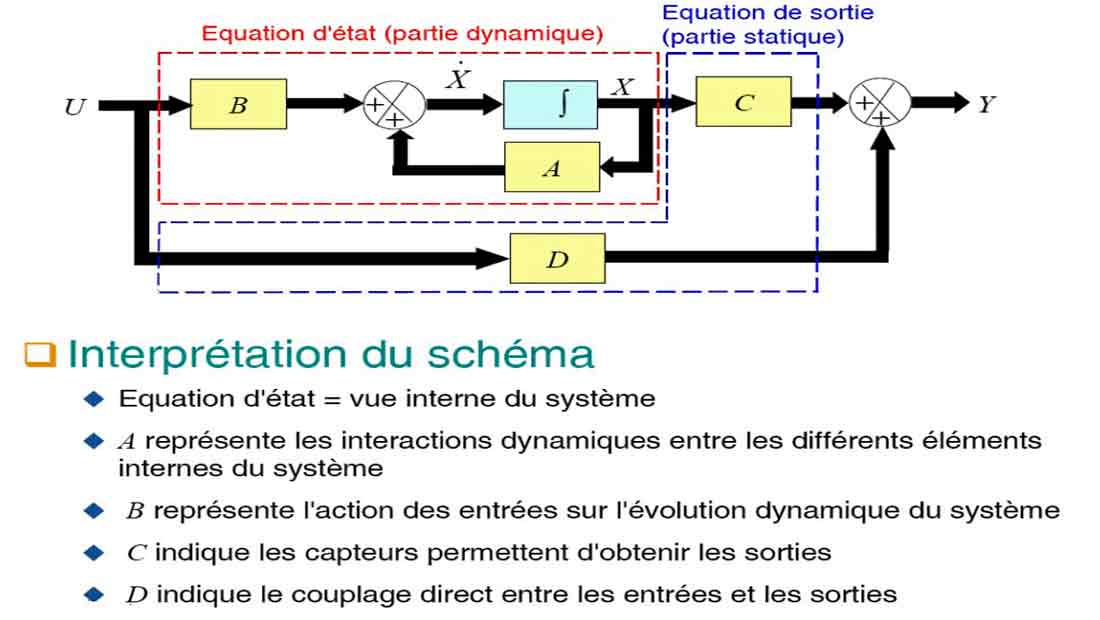
Forme générale du système
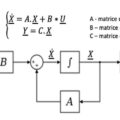
On considère un système linéaire de la forme :
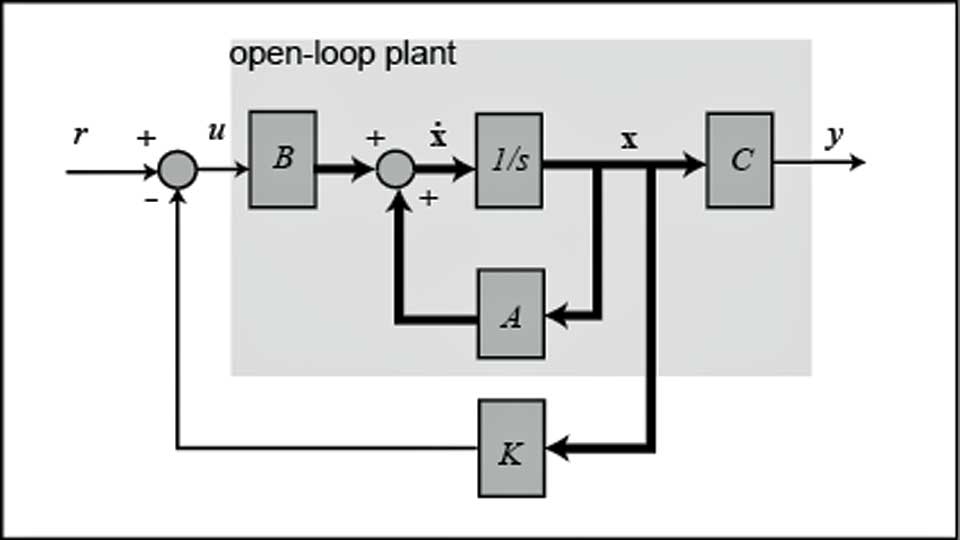
x' = A x + B u
où A est la matrice d’état, B est la matrice de commande, x l’état, u la commande.
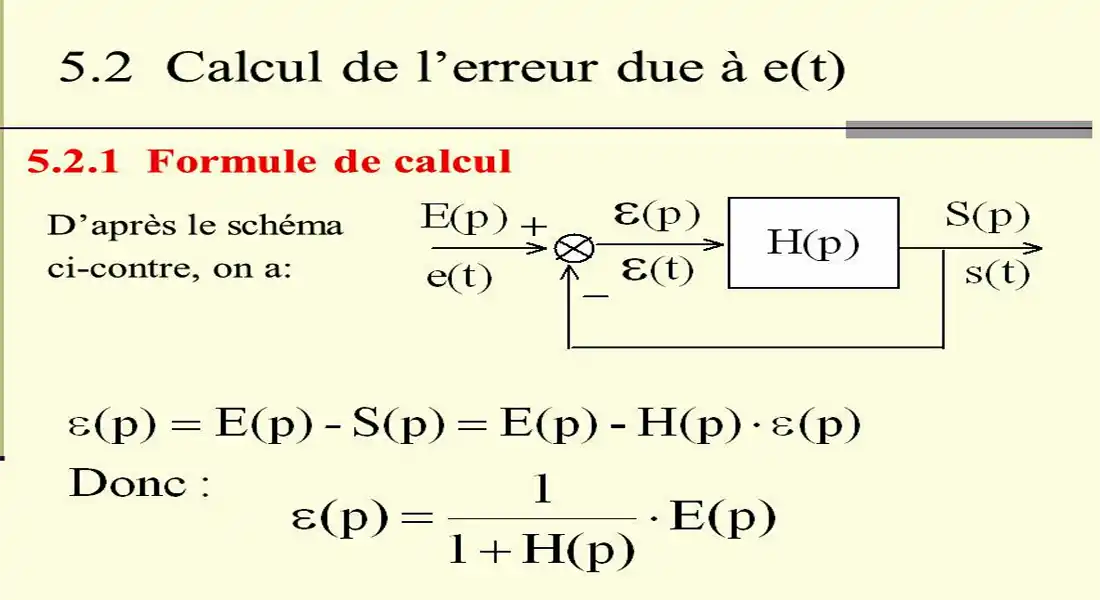
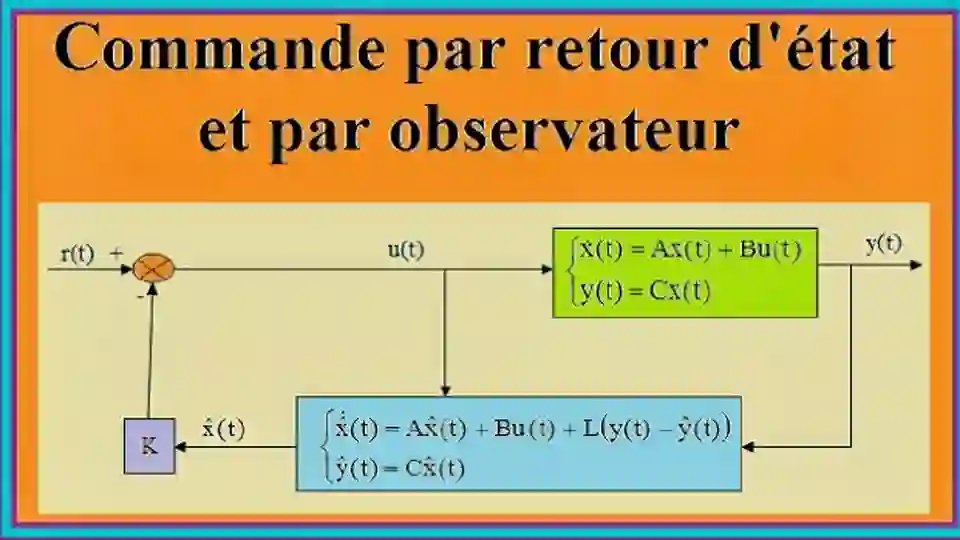
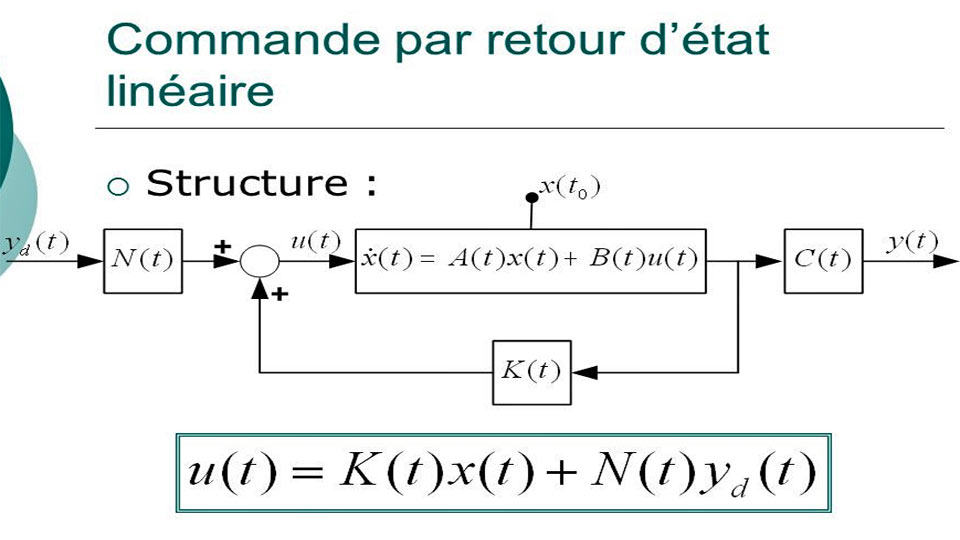
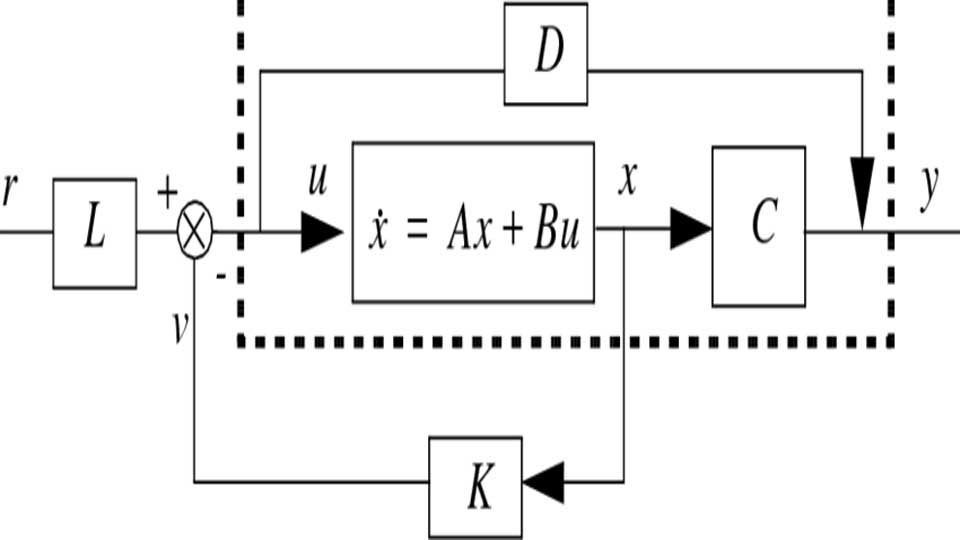
La commande d’état prend la forme u = -K x, ce qui donne le système fermé :
x' = (A - B K) x
Condition de commandabilité
Avant d’utiliser Ackermann, vérifiez la commandabilité avec la matrice :
C = [ B | A B | A² B | ... | A puissance (n-1) B ]
Le système est commandable si cette matrice est de rang n.
Choix des pôles désirés
Déterminez les pôles désirés du système fermé.
Déduisez le polynôme caractéristique souhaité sous la forme :
s^n + a(n-1) s^(n-1) + ... + a1 s + a0
Calcul du polynôme matriciel Phi(A)
On construit :
Phi(A) = A^n + a(n-1) A^(n-1) + ... + a1 A + a0 I
Formule de Ackermann
Le gain K est obtenu par :
K = [0 ... 0 1] × C⁻¹ × Phi(A)
Exercice sur le placement de pôles et l’observateur d’etat :
La Correction :
Sujets similaires:
 Exercices : Commande par placement de pôles ( Retour d’état)
Exercices : Commande par placement de pôles ( Retour d’état)
 Exercices corrigés sur la commande par retour d’état
Exercices corrigés sur la commande par retour d’état
 Exercice corrigé : Détermination de la matrice de Transition et calculer de l’état d’un système
Exercice corrigé : Détermination de la matrice de Transition et calculer de l’état d’un système
 Exercices : Représentation d’état et placement de pôles
Exercices : Représentation d’état et placement de pôles
 TD : Représentation d’état d’un système asservi avec Correction
TD : Représentation d’état d’un système asservi avec Correction