Skip to content
Nombre de vues : 2 968
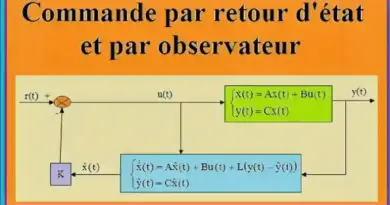
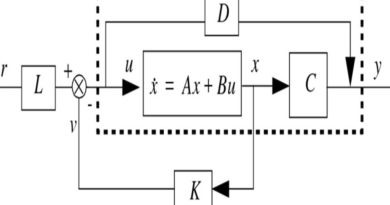
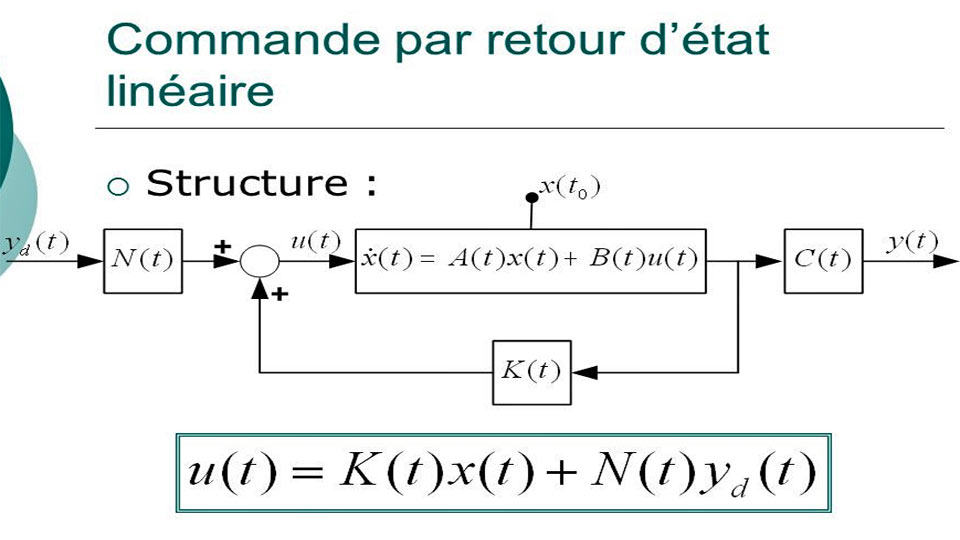
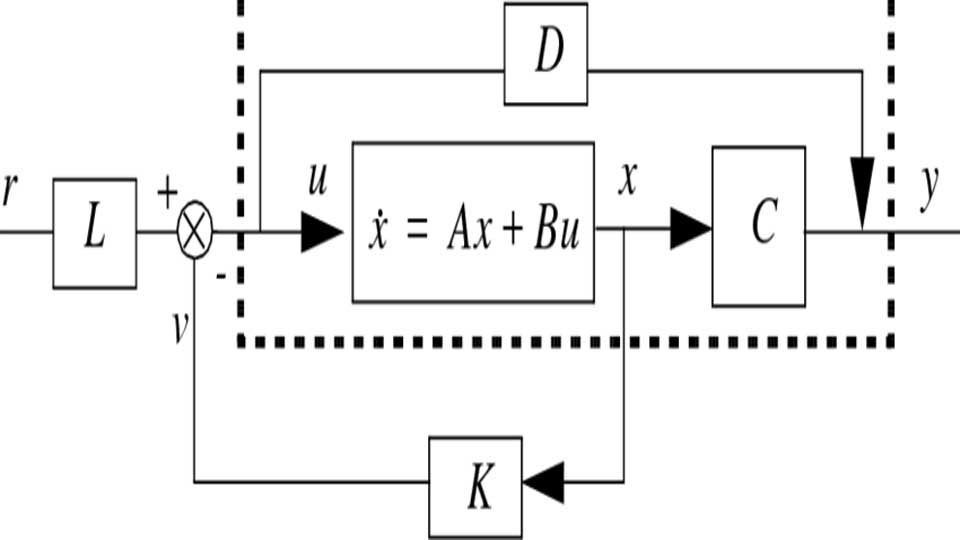
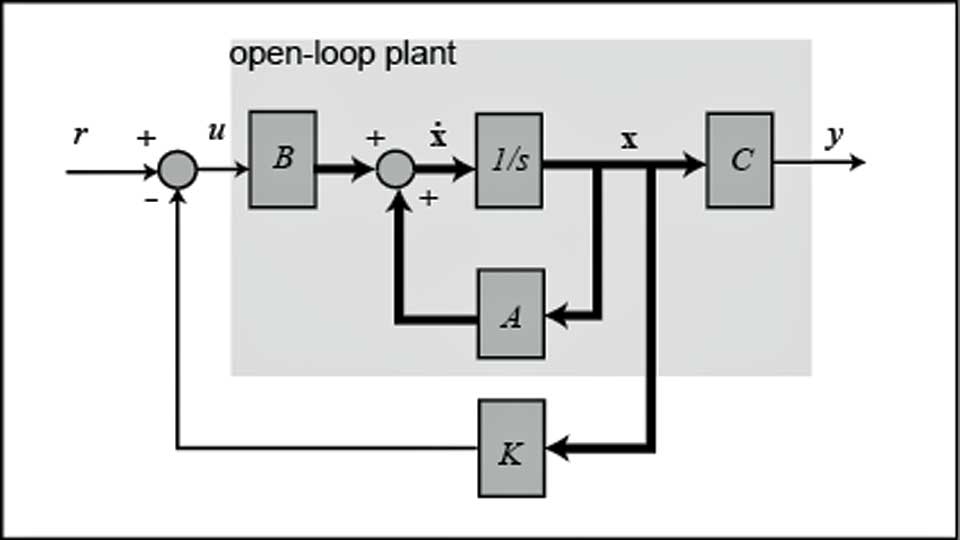
En automatique, la commande par retour d’état est un moyen de modifier le comportement dynamique en boucle fermée d’un système dynamique donné par une représentation d’état. Et cette approche suppose l’état connu. Elle n’est possible que si le système est commandable.
Un système linéaire invariant est asymptotiquement stable si toutes les valeurs propres de la matrice d’état A sont à partie réelle strictement négative.
Théorème : Un système d’équation d’état est complètement commandable à la condition nécessaire et suffisante que la matrice de commandabilité C (A, B) soit de rang n.

 Exercices corrigés sur la commande par retour d’état
Exercices corrigés sur la commande par retour d’état
 Exercices : Représentation d’état et placement de pôles
Exercices : Représentation d’état et placement de pôles
 Exercices : La représentation d’état des systèmes asservis
Exercices : La représentation d’état des systèmes asservis
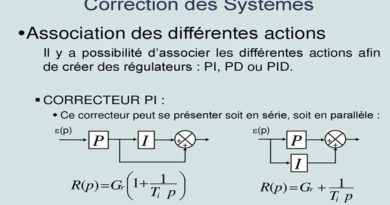
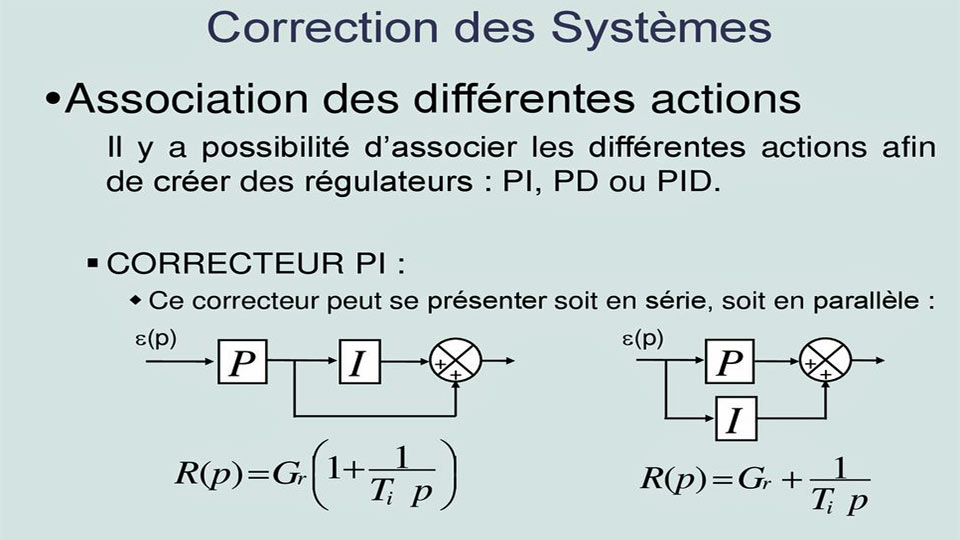 Exercices : Système de second ordre – Correcteur PID et PD
Exercices : Système de second ordre – Correcteur PID et PD
 Exercices : Calcul des erreurs de position et de vitesse d’un système asservi
Exercices : Calcul des erreurs de position et de vitesse d’un système asservi