Skip to content
Nombre de vues : 17 827
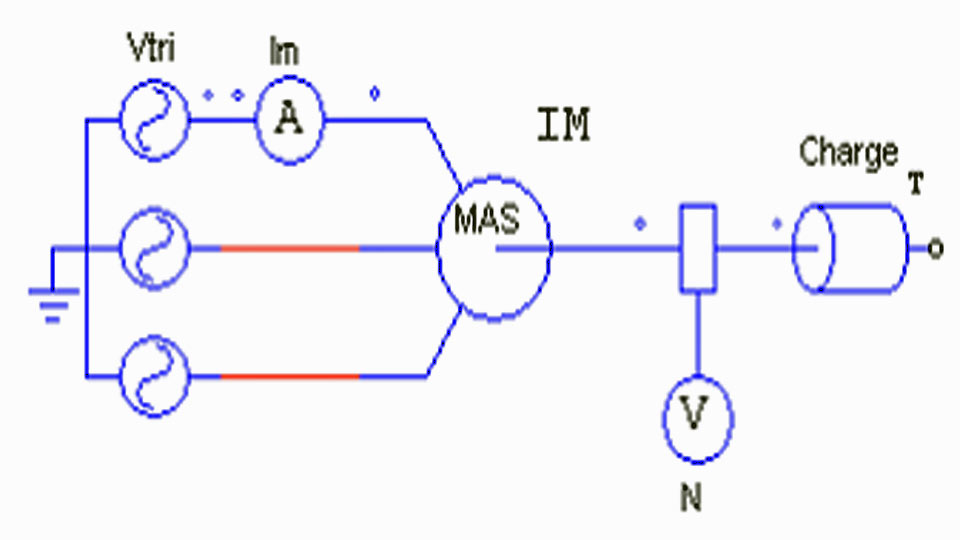
Le moteur asynchrone est constitué de deux parties : le stator et le rotor. Le stator est formé d’une carcasse ferromagnétique qui contient trois enroulements électriques. C’est la partie fixe du moteur. Le passage d’un courant dans les enroulements crée un champ magnétique à l’intérieur du stator.
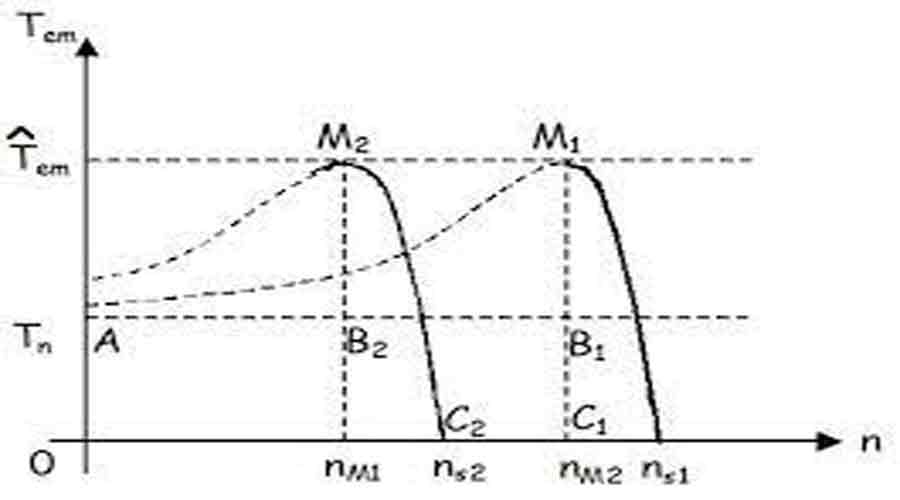
Le glissement est une grandeur qui rend compte de l’écart de vitesse de rotation d’une machine asynchrone par rapport à la vitesse de rotation de son champ statorique. Il doit y avoir une différence de vitesse pour que ce type de machine fonctionne car c’est le décalage entre le rotor et le champ statorique qui provoque l’apparition des courants induits au rotor, courants qui créent le champ rotorique. Il est toutefois possible, par exemple pour réaliser des mesures qui permettent d’identifier les caractéristiques de la machine (essai au synchronisme), d’atteindre la vitesse de synchronisme en utilisant un dispositif comportant au moins une deuxième machine (par exemple une machine synchrone utilisée en moteur), qui assurera la production du couple nécessaire au maintien de la rotation.
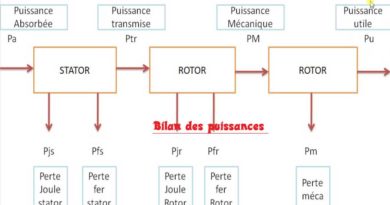
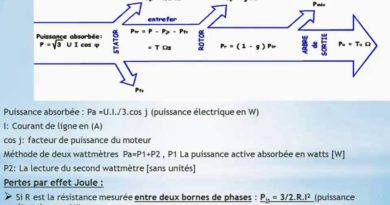
En régime, le glissement est toujours faible, de l’ordre de quelques pour cents : de 2 % pour les machines les plus grosses à 6 ou 7 % pour les petites machines triphasées, il peut atteindre 10 % pour les petites machines monophasées. Les pertes par effet Joule dans le rotor étant proportionnelles au glissement, une machine de qualité se doit de fonctionner avec un faible glissement.
On désigne par ns la vitesse de rotation du champ statorique dans la machine.
On désigne par n la vitesse de rotation de la machine.
La fréquence de synchronisme est toujours un sous-multiple entier de la fréquence de l’alimentation électrique :
En 50 Hz c’est un sous-multiple de 3 000 tr/min, soit : 3 000 ; 1 500 ; 1 000 ; 750, etc.
En 60 Hz c’est un sous-multiple de 3 600 tr/min, soit : 3 600 ; 1 800 ; 1 200 ; 900, etc.

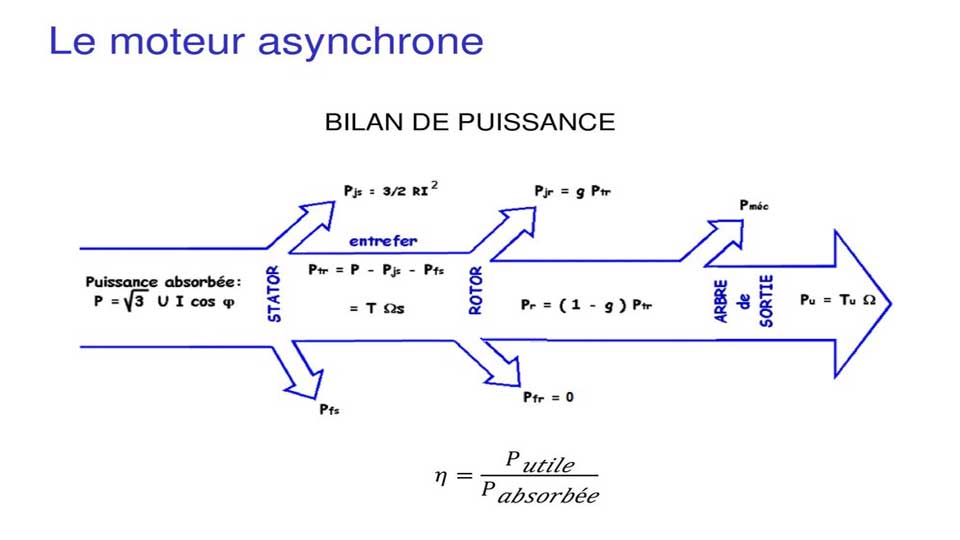
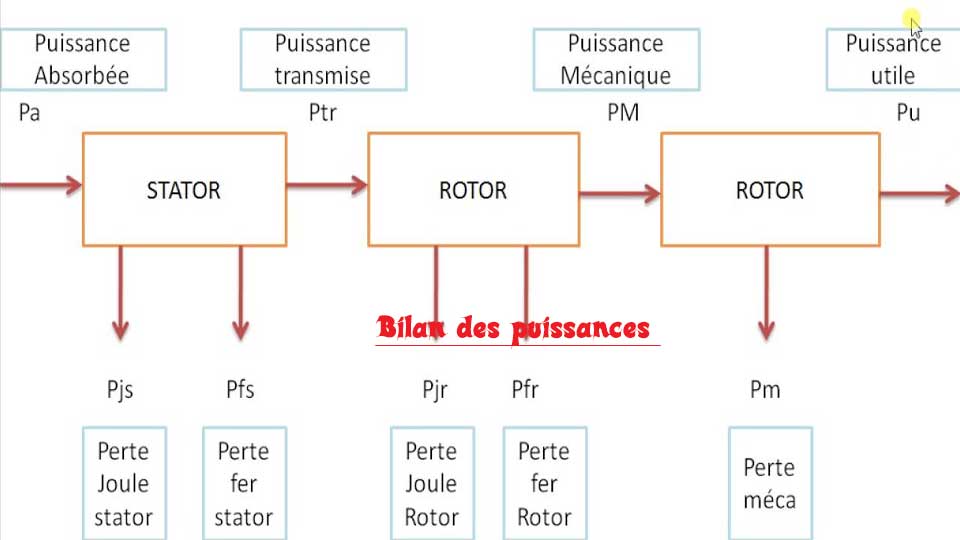
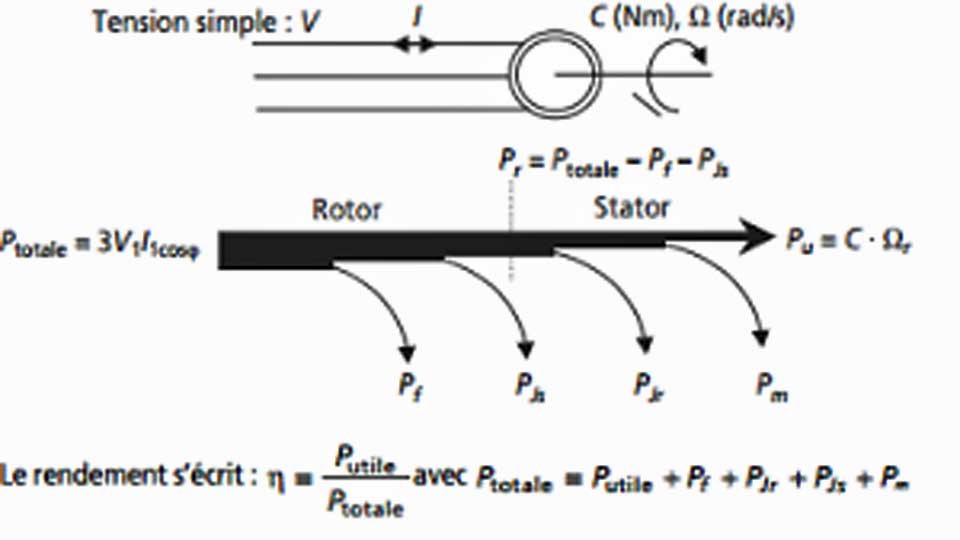
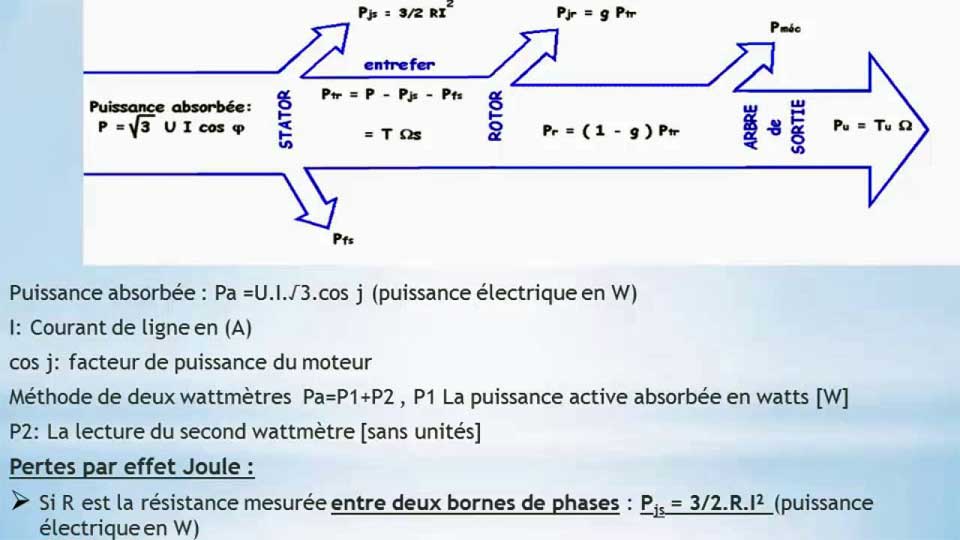 Exercices : Moteur Asynchrone triphasé : Couplage – Bilan des puissances
Exercices : Moteur Asynchrone triphasé : Couplage – Bilan des puissances
 Exercices corrigés : moteur asynchrone triphasé
Exercices corrigés : moteur asynchrone triphasé
 Exercices : Moteur Asynchrone triphasé, bilan des puissances
Exercices : Moteur Asynchrone triphasé, bilan des puissances
 Série 2 d’exercices corrigés sur le moteur asynchrone et le transformateur
Série 2 d’exercices corrigés sur le moteur asynchrone et le transformateur
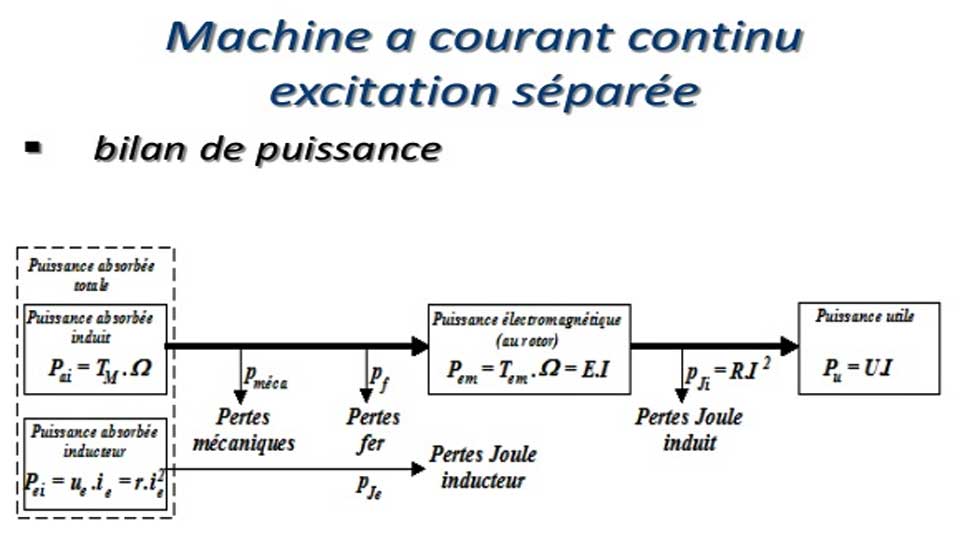 Exercices corrigés moteur à courant continu
Exercices corrigés moteur à courant continu