Skip to content
Electronique
Electricité
Filtres
Electronique Analogique
Electronique Numérique
Convertisseurs
Gradateur
Hacheur
Onduleur
Redresseur
Transformateur
Moteurs
Moteur à CC
Moteur asynchrone
Moteur synchrone
Modulations
Modulation d’amplitude
Modulation de fréquences
Signal
Transformée de Laplace
Transformée de Fourier
Automatique
Asservissement
Asservissement numérique
Vidéos
Contact
Asservissement
Asservissement
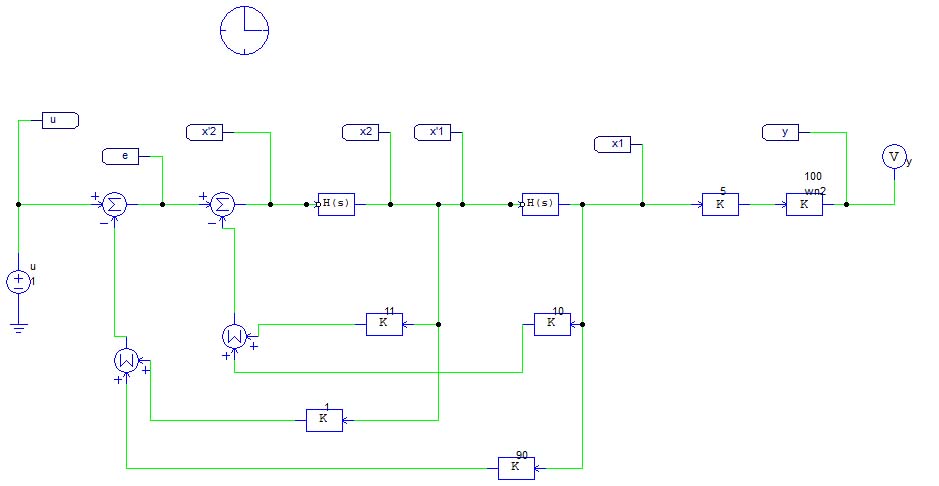
TP : Commande par retour d’état d’un système, sous PSIM
Asservissement
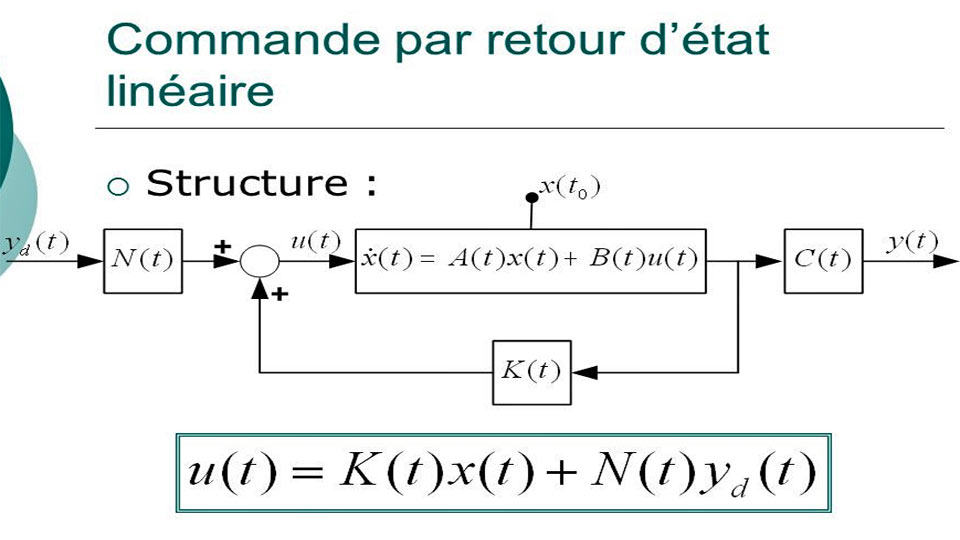
Exercices : Commande par placement de pôles ( Retour d’état)
Asservissement
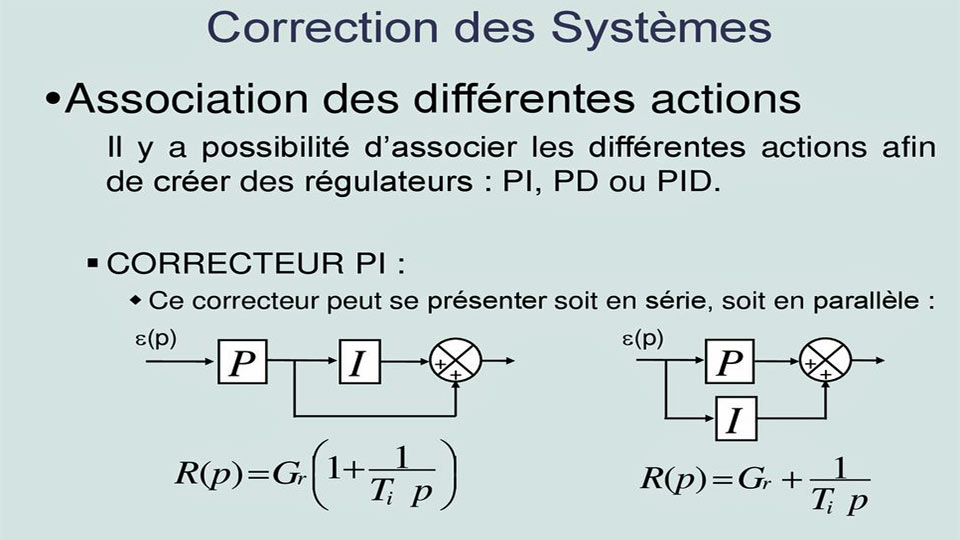
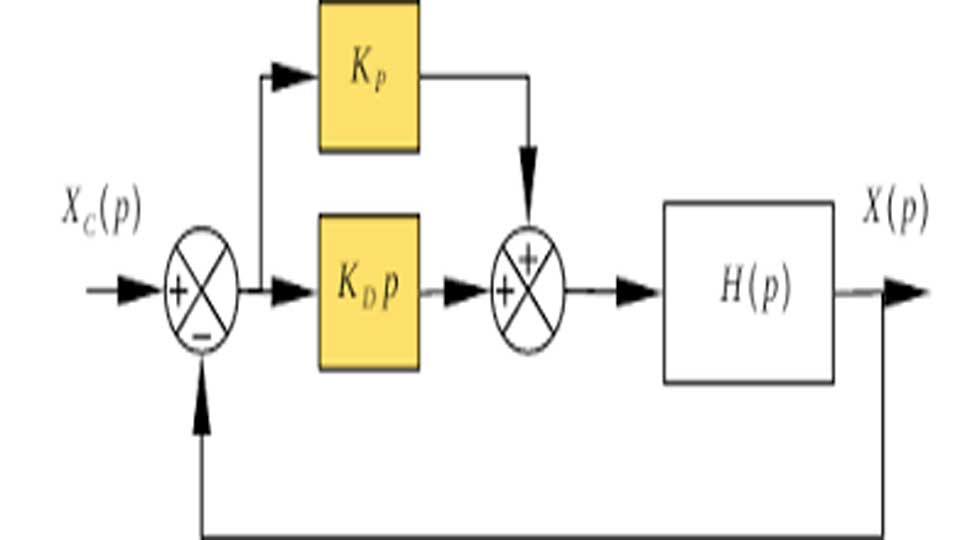
Exercices : Système de second ordre – Correcteur PID et PD
Asservissement
Exercices : Calcul des erreurs de position et de vitesse d’un système asservi
Asservissement
Exercice : Systèmes asservis – Correcteur Proportionnel Dérivateur
Asservissement
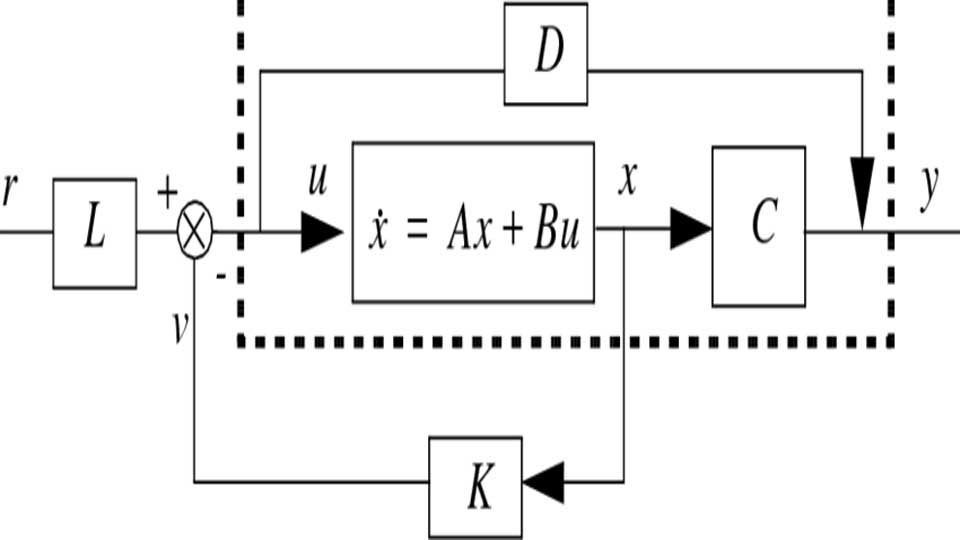
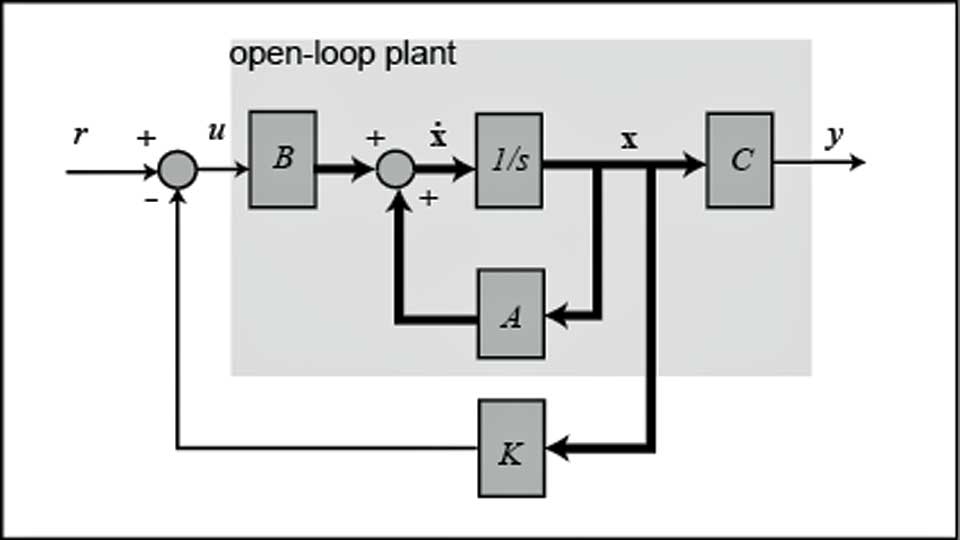
Exercices corrigés sur la commande par retour d’état
Asservissement
Exercices : Représentation d’état et placement de pôles
Asservissement
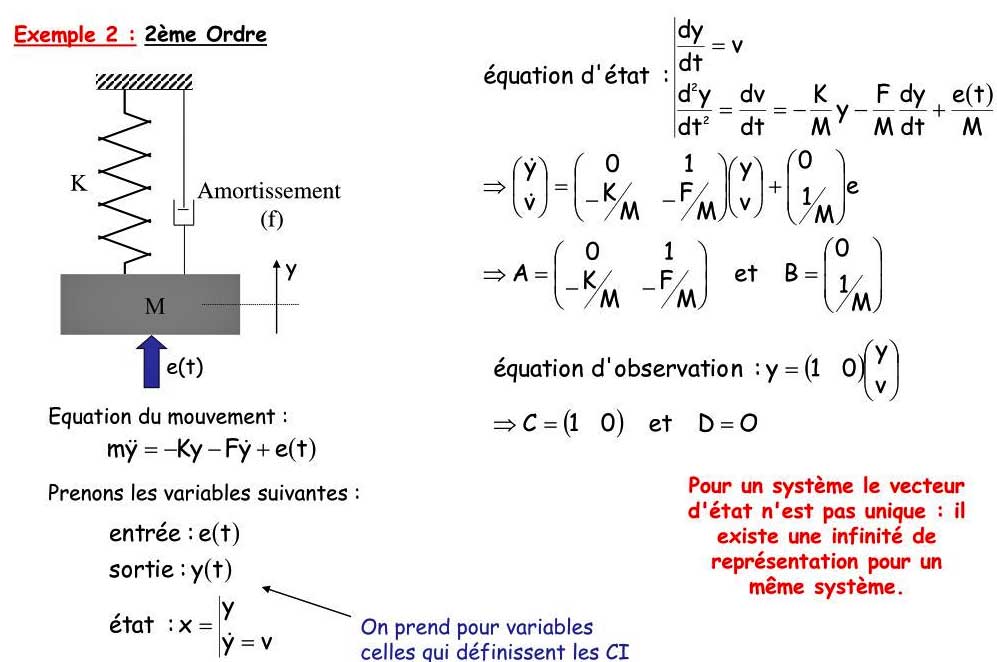
Exercices : La représentation d’état des systèmes asservis
Asservissement
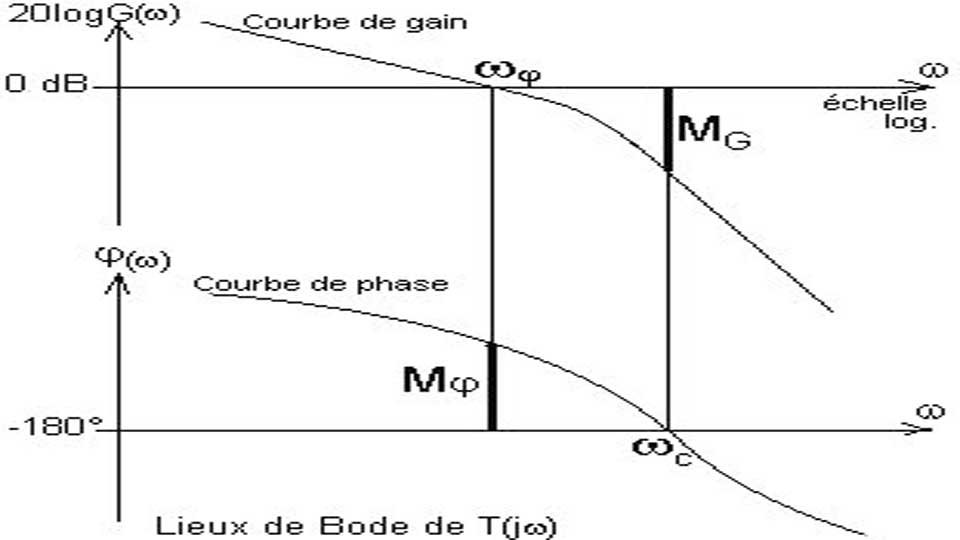
Exercices : Marge de gain et Marge de phase avec correction
Pagination des publications
1
2